

Accuracy & error calculation

Regarding Precision Accuracy
Since the GPS satellites are controlled by the US Department of Defense they do have a very high level of accuracy, however a multipath due to reflections from buildings and so on could cause errors to occur.
Regarding the Properties of the GPS Electro-Magnetic Waves and Signal Reception
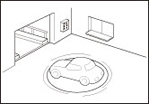
If there are any obstacles between the GPS antenna and the GPS satellite, electromagnetic-waves cannot be received from the satellite.
It is also impossible to use GPS positioning in the following locations as at least three simultaneous electromagnetic-waves are necessary to take measurements.
Also, if there are any obstacles around the GPS antenna, electromagnetic-waves cannot be received from the satellite.
 |  |  |
|
|
|
 |  |  |
|
|
|

Because the GPS satellite is in orbit around the earth, the reception status for the electromagnetic waves changes depending on their position at that point in time, even if your vehicle is in the same place. Also, electromagnetic-waves from satellites near the horizon can be easily influenced by surrounding obstacles.
At times, satellites under the control of the US Department of Defence will intentionally drop positioning accuracy.
Regarding Errors in Current Position Display
To pinpoint the current position, the unit uses information from GPS satellite electromagnetic waves. If any of these contain errors, the current position may not match the actual position.
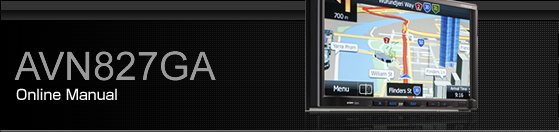
Regarding Vehicle Position Detection Correction Using Map Matching
Map matching is a method of comparing information on the current position acquired by GPS and so on, with the road driven up to that point, and correcting the current position based on the most likely road.
This unit uses information on the current position combined with independent navigation and satellite navigation and matches it to the shape of the road to create the correction.
However, as it cannot avoid the error margins at the current position, the current position may shift away from the actual position even when correcting using map matching.
Also, the vehicle marker may shift if the map data and the shape of the road being driven on differ.
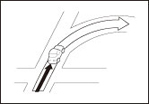
 |
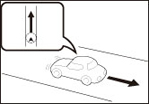
Actual Vehicle Swept Path
Vehicle swept path acquired from each sensor
Corrected using map matching on the screen |



Because it takes a short time for operations to stabilise just after turning on the unit, the vehicle mark may not immediately match the vehicle as it moves. After driving for a while, operations stabilise, and the marker should match the actual driving position.
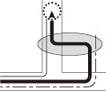
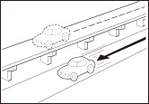
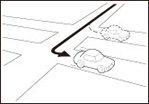
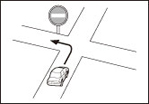
Regarding the Accuracy of the Current Position and Route Navigation
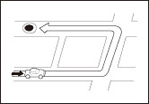
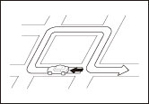
As in the following images, an accurate display of the current position or route navigation may not be provided, however this is not an indication of a malfunction in the unit, but is due to road conditions or driving conditions.
 |  |  |
|
|
|
 |  |  |
|
|
|
 |  |  |
|
|
|
 |  | |
|
|
Regarding Roads and Place Name Data
Because road and place names may change after the map data has been created, there may be times when road and place names do not match.
When no information is available in the map data, function such as display of road names, searching for facilities, and route guidance cannot be used.
Regarding Route Navigation
 |  |  |
|
|
|
 |  |  |
|
|
|
 |  | |
|
| |
 | ||
| ||
Performing a new search while travelling at high speeds may take some time.
The route may not change even after performing another search.
When isolated locations or roads with no surrounding available information are set as the current position/destination, you may not be able to search for a route.
A route may not be displayed when the current position is close to the destination.
Even if you select toll roads as a priority, the route may not guide you through a toll road.
In a similar way, toll roads may be displayed even if you prioritise other roads over toll roads.
(When it is possible to select a toll road or a normal road to create the route, priority is given to the user's toll road preference - use toll roads, or avoid toll roads.)
