

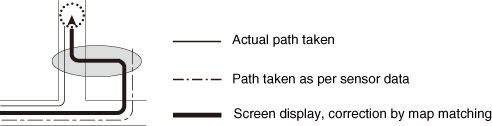
About Correction of Vehicle Position Detection by Map Matching

Map matching refers to a system of comparting present location information obtained using GPS and the like with the roads which you have travelled on so far and correcting your present location so that you are on the most appropriate road.
This receiver uses road shapes to correct the present location information that has been obtained by combining independent measurements and satellite measurements.
However, since some error in the present location is unavoidable, the present location will sometimes differ from your actual position even after correction by map matching.
The vehicle mark may also leave the road you are driving on when it differs in form to the map data.

Since this receiver does not operate in a stable manner when first switched on, the vehicle mark may differ from your actual position when you start moving. After a short while, operation stabilizes and normal operation will ensue.
